See it in action
Real output from real datasets
Every output below was generated by running Forge on the pusht dataset.
$ forge inspect hf://lerobot/pusht
Dataset: lerobot/pusht
Format: lerobot-v3 (v3.0)
Episodes: 206
Total frames: 25,650
Observation Schema
┏━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━┳━━━━━━━┓
┃ Field ┃ Type ┃ Shape ┃
┡━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━╇━━━━━━━┩
│ observation.state │ float32 │ (2,) │
│ next.success │ bool │ (1,) │
│ next.reward │ float32 │ () │
│ next.done │ bool │ () │
└───────────────────┴─────────┴───────┘
Action: float32 (2,)
Cameras: image: 96x96 (rgb)
FPS: 10
Language: yes (100% coverage)
Sample: "Push the T-shaped block onto the T-shaped target."
$ forge quality hf://lerobot/pusht
Analyzing episodes... ━━━━━━━━━━━━━━━━━━ 206/206
╭────────── Quality Report: pusht (206 episodes) ──────────╮
│ │
│ Overall Quality Score: 8.5 / 10 │
│ │
│ Smoothness (LDLJ) 0.75 OK │
│ Dead Actions 0.99 OK │
│ Gripper Health 1.00 OK │
│ Static Detection 1.00 OK │
│ Timestamp Regularity 1.00 OK │
│ Action Saturation 0.87 OK │
│ Action Diversity 0.30 OK │
│ │
╰───────────────────────────────────────────────────────╯
$ forge lint hf://lerobot/pusht
WARN camera.ambiguous_name
Camera 'image' doesn't say where it is (third-person vs wrist?).
→ Use <modality>.<location>, e.g. 'observation.images.wrist'.
WARN task.missing
Dataset has no language / task instructions.
→ VLA training needs per-episode instructions; add them.
INFO camera.low_resolution
Camera 'image' is 96x96; below 640x480.
INFO camera.too_few_views
Only 1 camera view(s); HF recommends >= 2.
PASS 206 episodes 0 errors, 2 warnings, 2 info
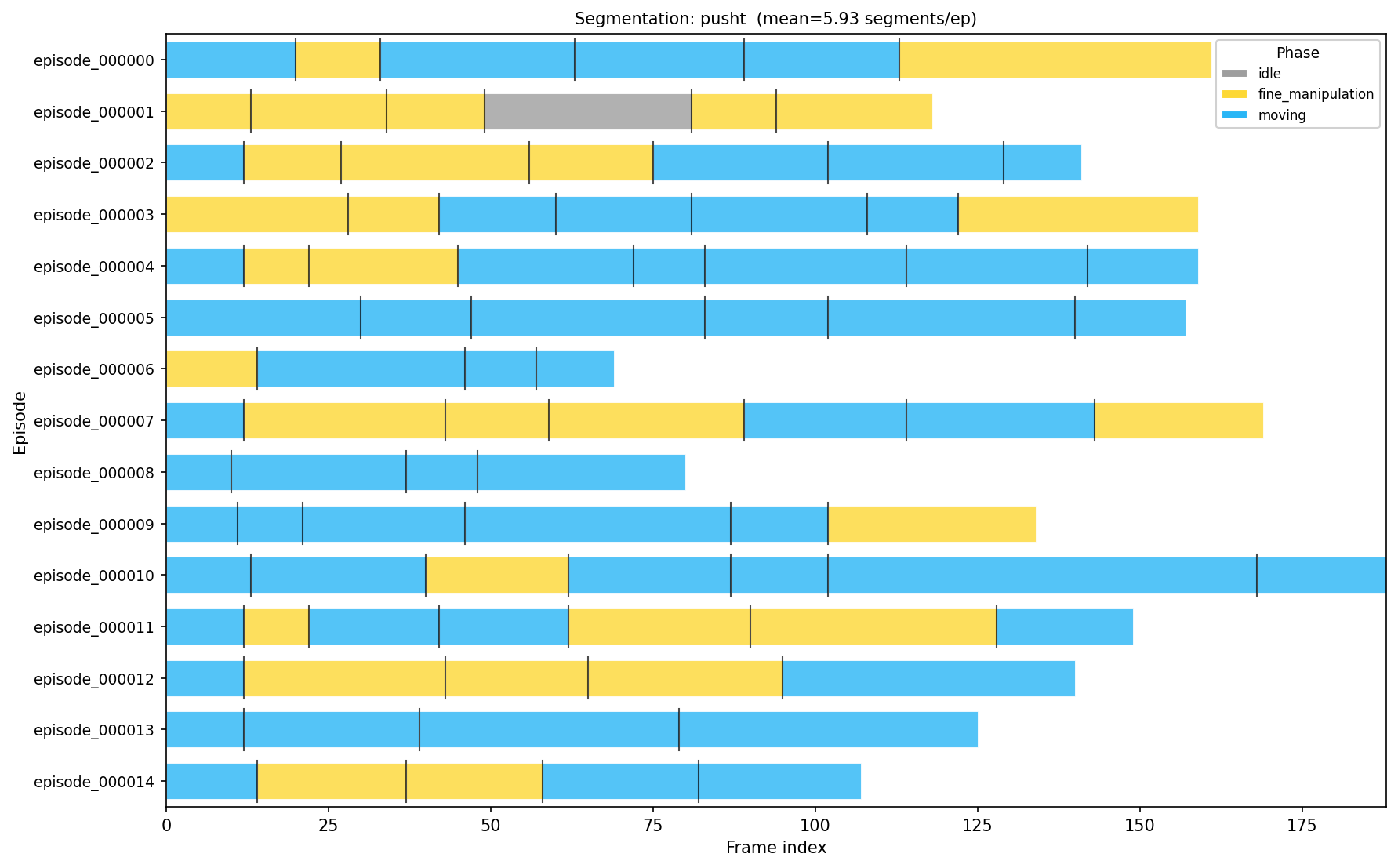
$ forge segment pusht --sample 8 --label --penalty aic
Resolved from registry: PushT (lerobot)
Format: lerobot-v3 | Signal: observation.state | Penalty: aic
Segmentation Results
┏━━━━━━━━━━━━━━━━┳━━━━━━━━┳━━━━━━━━━━┳━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━━┓
┃ Episode ┃ Frames ┃ Segments ┃ Changepoints ┃ Labels ┃
┡━━━━━━━━━━━━━━━━╇━━━━━━━━╇━━━━━━━━━━╇━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━━━━━━━━┩
│ episode_000000 │ 161 │ 6 │ 20, 33, 63... │ moving -> fine_m... │
│ episode_000001 │ 118 │ 6 │ 13, 34, 49... │ fine_m -> fine_m... │
│ episode_000002 │ 141 │ 7 │ 12, 27, 56... │ moving -> fine_m... │
│ episode_000003 │ 159 │ 7 │ 28, 42, 60... │ fine_m -> fine_m... │
│ episode_000004 │ 159 │ 8 │ 12, 22, 45... │ moving -> fine_m... │
│ episode_000005 │ 157 │ 6 │ 30, 47, 83... │ moving -> moving... │
│ episode_000006 │ 69 │ 4 │ 14, 46, 57 │ fine_m -> moving... │
│ episode_000007 │ 169 │ 7 │ 12, 43, 59... │ moving -> fine_m... │
└────────────────┴────────┴──────────┴─────────────────┴───────────────────────┘
╭────────────────── Summary ──────────────────╮
│ Episodes: 8 │
│ Mean segments/episode: 6.38 │
│ Range: 4 — 8 │
│ Total changepoints: 43 │
╰───────────────────────────────────────────╯
$ forge filter ./dataset ./filtered --min-quality 6.0
Filtering episodes... ━━━━━━━━━━━━━━━━━━ 206/206
┏━━━━━━━━━━━━━━━━┳━━━━━━━┳━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━┓
┃ Episode ┃ Score ┃ Flags ┃ Status ┃
┡━━━━━━━━━━━━━━━━╇━━━━━━━╇━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━┩
│ episode_000000 │ 8.7 │ │ KEEP │
│ episode_000001 │ 9.1 │ │ KEEP │
│ episode_000002 │ 8.4 │ │ KEEP │
│ episode_000003 │ 5.2 │ jerky, hesitant │ EXCL │
│ episode_000004 │ 7.8 │ │ KEEP │
│ episode_000005 │ 3.1 │ mostly_static │ EXCL │
│ episode_000006 │ 8.9 │ │ KEEP │
│ ... 199 more episodes ... │
└────────────────┴───────┴────────────────────┴────────┘
╭────────────── Filter Results ──────────────╮
│ │
│ Episodes kept: 189 / 206 │
│ Episodes excluded: 17 │
│ Written to: ./filtered/ │
│ │
╰─────────────────────────────────────────────╯
$ forge tokenize compare pusht --sample 2000
Tokenizer comparison: pusht — 25,650 frames, action_dim=2, scored on 2000
Tokenizer Comparison
┏━━━━━━━━━━━━━━━━┳━━━━━━━┳━━━━━━━━┳━━━━━━━━━┳━━━━━━━━━┳━━━━━━━━━━━━┓
┃ Strategy ┃ Vocab ┃ MAE ┃ MSE ┃ Max-abs ┃ Vocab util ┃
┡━━━━━━━━━━━━━━━━╇━━━━━━━╇━━━━━━━━╇━━━━━━━━━╇━━━━━━━━━╇━━━━━━━━━━━━┩
│ uniform-bins ✓ │ 256 │ 0.4829 │ 0.3098 │ 0.9746 │ 96% │
│ quantile-bins │ 256 │ 0.6442 │ 1.6471 │ 23.5000 │ 100% │
│ openvla-bins │ 256 │ 0.6828 │ 7.6404 │ 61.7969 │ 100% │
│ mu-law │ 256 │ 2.8620 │ 12.5675 │ 10.9926 │ 27% │
└────────────────┴───────┴────────┴─────────┴─────────┴────────────┘
Lowest MAE: uniform-bins
# pusht actions are raw pixel coords — RT-1 min/max bins beat OpenVLA's
# percentile clipping on this dataset. The right tokenizer depends on your data.
forge segment pusht --label --plot timeline.png — semantic phase labels via proprioception
forge visualize pusht --segment — browser-based viewer with segment overlay
forge visualize droid_100 --backend rerun --samples 2 — Rerun viewer: cameras, time-series, and segment labels on one timeline
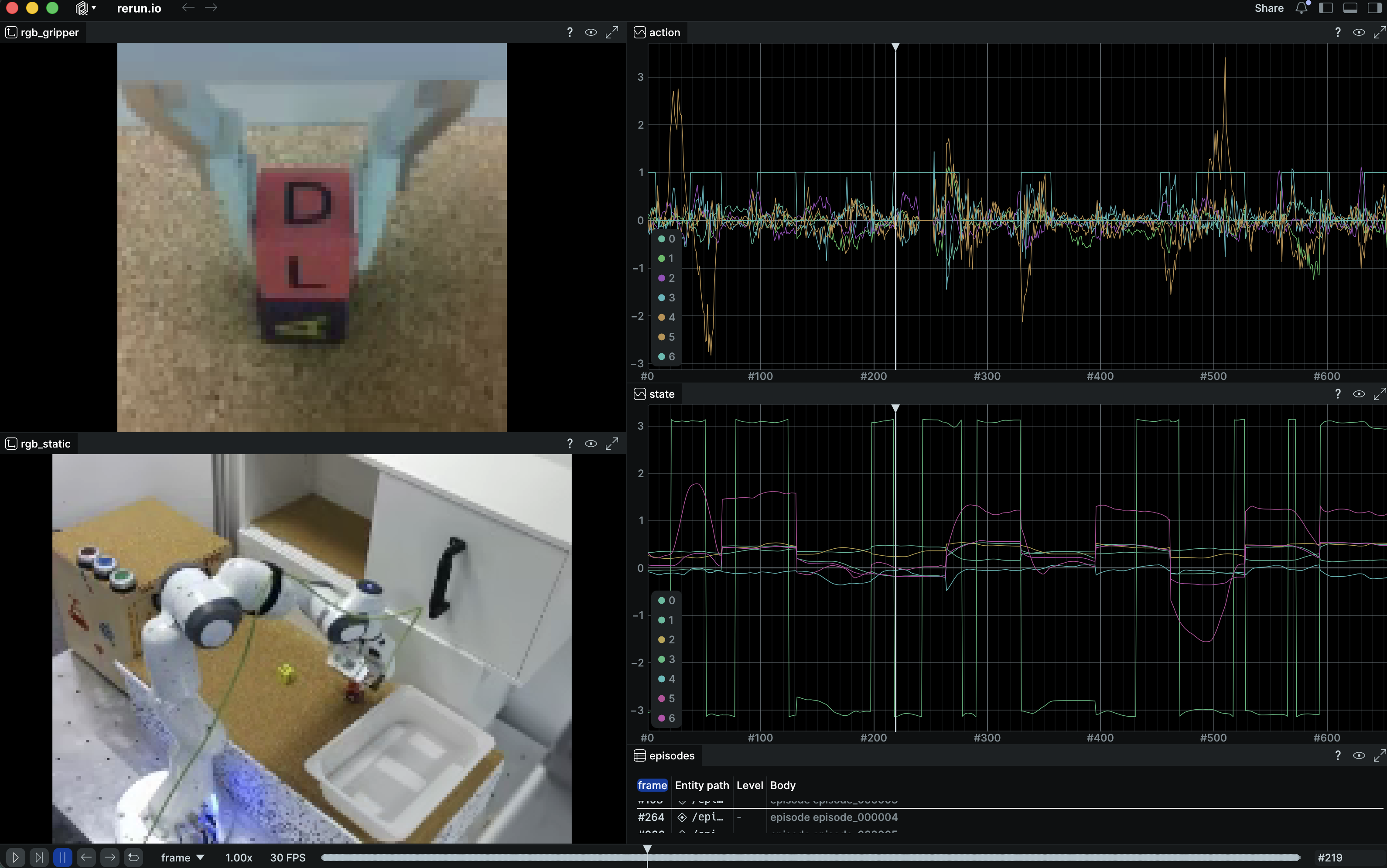
Install: pip install forge-robotics[rerun]